Mithilfe von Informations- und Kommunikationstechnologie werden bereits heute einige Flughafenbahnen, Metrosysteme und U-Bahnen im automatisierten Fahrbetrieb betrieben1. Je nach Automatisierungsgrad kann der Automatikbetrieb mit Fahrer oder fahrerlos im vollautomatischen Zugbetrieb ausgelegt werden.
Ein vollautomatischer fahrerloser Betrieb auf Eisenbahnstrecken ist theoretisch möglich und kann auf sehr lange Frist auch umgesetzt werden. Jedoch muss bei einer Automatisierung der Komplexität des Netzes und des Bahnbetriebs Rechnung getragen werden. Ein automatisierter Fahrbetrieb wird primär zur Verbesserung der Energieeffizienz und Erhöhung der Streckenkapazität eingerichtet. Eine Abschwächung von Streikauswirkungen bzw. Absicherung gegenüber Streiks als Hauptgrund für eine Umrüstung ist aufgrund der hohen Investitions- und Umrüstkosten in Fahrzeuge und Strecke unwirtschaftlich.
Wie funktioniert ein automatisierter Bahnbetrieb / ATC (Automatic Train Control)?
Der automatisierte Bahnbetrieb / Automatic Train Control (ATC) basiert auf drei Subsystemen, welche heute vor allem im Metrobereich angewendet werden, aber vom Prinzip auch für Regional- und Fernzüge angewendet werden könnten.

Die automatische Zugsicherung (Automatic Train Protection – ATP) kontrolliert die Einhaltung der Geschwindigkeit und der Abstände. Ist ein Streckengleis in mehrere Streckenblöcke eingeteilt kontrolliert ATP die Einhaltung des festen Raumabstands. Hierfür erhält das Zugsicherungssystem Informationen über die Belegung der kommenden Streckenblöcke durch einen vorausfahrenden Zug, wandelt diese in eine Geschwindigkeitsbegrenzung für den Streckenblock um, in dem sich der Zug gerade befindet, und sendet die neue Geschwindigkeitsbegrenzung an die Strecke. Der Zug nimmt diese Informationen über ortsfeste Einrichtungen wie Gleisstromkreise oder Balisen auf. Die Automatic Train Protection (ATP) stellt zudem sicher, dass die Türen vor Abfahrt des Zuges geschlossen sind und die Fahrstraße richtig eingestellt ist.

Die automatische Zugsteuerung ATO fährt den Zug nach Fahrplan mit allen Zwischenhalten und kontrolliert die Türsteuerung. Über ATO spots (im Allgemeinen Balisen) werden Informationen über fahrplanmäßige Halte und die Einfahrgeschwindigkeit in einen Bahnhof übertragen. Vor jeder Station sind mehrere Balisen in unterschiedlichen Abständen verbaut.

Bei Überfahren der ersten Balise erhält der Zug einen Bremsbefehl. Der Bordrechner kalkuliert die Bremskurve, um an einem vordefinierten Punkt zum Halten zu kommen. Um die Genauigkeit zu verbessern, wird diese Bremskurve bei Einfahrt in den Bahnhof mit weiteren Balisen in enger werdenden Abständen aktualisiert.

Je nach Automatisierungsgrad befindet sich noch ein Fahrzeugführer an Bord bzw. hat Kontrolle über den Zug oder nicht.
Bei einem halbautomatisierten Bahnbetrieb (Semi-Automatic Train operation / STO) übernimmt die Steuerung die Beschleunigungs- und Bremsvorgänge mit dem Ziel eines hinsichtlich Energiebedarfs und Streckenkapazität optimierten Betriebs. Der Fahrzeugführer kontrolliert die Türen und übernimmt die Anfahrvorgänge (beispielsweise übernimmt der Computer nach drei Sekunden Beschleunigung den Zug).
Beim fahrerlosen Zugbetrieb (Driverless Train Operation / DTO) befindet sich weiterhin ein Fahrzeugführer oder ein speziell ausgebildeter Zugbegleiter an Bord. Diese nehmen hauptsächlich Serviceaufgaben für die Fahrgäste wahr, können jedoch in Notfallsituationen den Zug steuern. Je nach System haben sie zudem die Aufgabe, die Türen zu öffnen bzw. zu schließen.
Beim unbemannten Zugbetrieb (Unattended Train Operation / UTO) befindet sich kein Personal mehr im Zug. Dieses System kann entweder für Fahren ins / vom Depot an den Bahnsteig, bei Zugwenden oder im Fahrgastbetrieb eingesetzt werden. Diese Art des Zugbetriebs stellt hohe Anforderungen an die Ausfallsicherheit von Steuerungsrechner und Kommunikationseinrichtungen. In Notfallsituationen sollte sichergestellt sein, dass Personal den Zug möglichst schnell erreichen kann. Zudem sollte eine Form der Hinderniserkennung vorhanden sein.
Die automatisierte Zugüberwachung ATS (Automatic Train Supervisory) überwacht alle Fahrstraßen und Zugfahrten auf dem Netz und gibt entsprechende Informationen in der Leitstelle aus.
Ein automatisierter Zugbetrieb kann mit festem oder mit wanderndem Raumabstand durchgeführt werden. Beim Fahren im wandernden Raumabstand wird auf ortsfeste Blöcke und deren Gleisfreimeldeanlagen verzichtet. Die Züge ermittelnden Standort ihres Zugschlusses selber und senden ihn quasi-kontinuierlich an den folgenden Zug. Dieser berechnet unter Berücksichtigung seines Bremsweges den Punkt, ab dem die Geschwindigkeit herabgesetzt werden muss. Der ermittelte Standort wird durch Balisen entlang der Strecke überprüft. Eine Anpassung der Streckengeschwindigkeit wird über Funk (GSM-R) an den Steuerungscomputer des Zuges übertragen. Bei Ausfall der Übertragung stoppt der Zug automatisch in sicherem Abstand zu einem vorausfahrenden Zug.

Automatisierungsgrad
Die Automatisierung des Zugbetriebs erfolgt in verschiedenen Stufen :
- halbautomatischer Zugbetrieb mit eingeschränkter Kontrolle durch den Fahrzeugführer
- vollautomatischer Zugbetrieb im artreinen Verkehr auf einem eigenen eigenständigen Netz
- vollautomatischer Zugbetrieb im Mischbetrieb auf einem frei zugänglichen Netz
- vollautomatischer Zugbetrieb als einzige Betriebsform auf einem frei zugänglichen Netz
Alle Stufen sind bereits bei Metrosystemen im Echtbetrieb implementiert und weltweit verbreitet. Bis heute gibt es noch keine vollautomatische Anwendung im Fernverkehr, Hochgeschwindigkeitsverkehr oder Regionalverkehr.
Im direkten Vergleich ist ein automatisierter Betrieb in U-Bahn / Metrosystemen aufgrund der speziellen Systembeschaffenheit einfacher:
- Strecken verlaufen zum Großteil in einer geschlossenen und geschützten Umgebung (Tunnel, aufgeständert)
- Das Rollmaterial ist vergleichsweise homogen und für die Belange des Personenverkehrs spezifiziert
- Linien werden häufig nur mit einer Baureihe bedient
- Die Bahnsteige und Gleisanlagen sind in ihrer Bauweise großteils identisch
- Das Betreten des Gleises kann durch bündig mit der Strecke abschließenden Bahnsteigtüren in den Stationen verhindert werden.
- Jede einzelne Strecke entspricht dem gleichen technischen Standard mit identischer technischer Ausrüstung
- Metronetze sind in ihrer Struktur einfacher aufgebaut und haben nicht den gleichen Integrationsgrad wie konventionelle Schienennetze
- Die Netze sind isoliert und kleiner.
- Infrastruktur und Betrieb sind meistens in einer Hand
- Aufgrund des starken Verkehrs werden Instandhaltungs- und Baumaßnahmen oftmals außerhalb der Betriebszeiten durchgeführt.
Ein System der Stufe 1 wird neben Metrosystemen bereits seit Beginn der neunziger Jahre von der tschechischen Staatsbahn České dráhy eingesetzt. CRV (Vehicle Central Computer), ARR (Automatic speed control) und AVV (Automatické Vedení Vlaku / Automatic Train Operation) ermöglichen ein genaueres Bremsen und passgenaues Halten (Eisenbahn +/- 1m, Metro +/- 0,1m), Halten der erreichten Fahrgeschwindigkeit (+/- 1 km/h) sowie für die Optimierung des Traktionsenergieverbrauchs und der Fahrzeiten.
Im Fahrcomputer sind eine Streckenkarte mit allen notwendigen Informationen sowie der Fahrplan hinterlegt. Im Streckenspeicher sind die Position von Geschwindigkeitstafeln, die Position von Weichen und Signalen, die Position von Bahnsteigen und die Gefälleabschnitte eingespeichert. Der Fahrplan umfasst eine Liste aller Stationen und Halte des Zuges, die Ankunfts- und Abfahrtszeiten sowie die Geschwindigkeitsvorgaben für einzelne Streckenabschnitte. Vom Triebfahrzeugführer müssen Zugnummer, Bremshundertstel, Zuglänge und Ausgangsgeschwindigkeit in den Computer eingegeben werden. Zur Positionsbestimmung sind 250 km des Streckennetzes mit magnetischen Balisen des Typs MIB–6 ausgerüstet. Im Zuge der Umrüstung auf ETCS sollen diese durch ETCS-Eurobalisen ersetzt werden.
Ziel des Systems ist ein Heranführen des Zuges an den nächsten Halt innerhalb der vorgegebenen Fahrzeit (falls möglich) und mit minimalem Energieeinsatz durch “Aussegeln”, eine Herabsetzung der Höchstgeschwindigkeit oder eine geringere Beschleunigung. (Weitere Informationen)

Für U-Bahn- und Metrosysteme hat der Internationale Verband für öffentliches Verkehrswesen (franz: Union Internationale des Transports Publics (UITP)) fünf Automatisierungsgrade (GoA – Grades of Automation) bestimmt:
- GoA 0: Fahrzeugführer fährt auf Sicht
- GoA 1: Fahrzeugführer beschleunigt und bremst, kontrolliert die Türsteuerung und bewältigt Notfallsituationen oder ungeplante Umleitungen (manueller Betrieb)
- GoA 2: automatisierte Beschleunigungs- und Bremsvorgänge, Fahrzeugführer rüstet den Zug auf und ab, kontrolliert die Türsteuerung, kann bei Bedarf den Zug selbst steuern und bewältigt Notfallsituationen (halbautomatischer Betrieb, semi-automatic train operation (STO))
- GoA 3: automatisierter Zugbetrieb, der Zugbegleiter kontrolliert die Türsteuerung und steuert den Zug in Notfallsituationen (driverless train operation (DTO))
- GoA 4: automatisierter Zugbetrieb, automatisierte Türsteuerung und automatisierte Bewältigung von Notfällen. Im Zug befindet sich keinerlei Personal (unattended train operation (UTO))
Vorteile eines automatisierten Bahnbetriebs
Ein automatisierter Bahnbetrieb dient vor allem dem Ziel einer höheren Energieeffizienz des Bahnverkehrs. Er ermöglicht ein energieoptimales Fahren und ein Heransegeln an rot zeigende Signale oder Halte.
Die von Alstom in Kooperation mit Industriepartnern, Infrastrukturbetreibern, Eisenbahnverkehrsunternehmen und Hochschulen entwickelten “GreenRail-Algorithmen” zur Entwicklung und Anwendung effizienter Fahrstrategien zeigen das Potenzial einer energetisch optimierten Zugfahrt. Die Algorithmen optimieren die Beschleunigungsphase, die Beharrungsphase und den Bremsvorgang vor dem Hintergrund eines optimierten Energieverbrauchs und einer pünktlichen Ankunft.
Ein Test auf der belgischen Strecke Welkenraedt – Verniers ergab ein durchschnittliches Einsparungspotenzial in Höhe von 12 Prozent im Vergleich zu einer nicht-optimierten normalen Fahrt und eine Einsparung von 20 Prozent im Vergleich zu einer straffen Fahrweise.2
Die folgende Grafik zeigt die erlaubte Höchstgeschwindigkeit, das Fahrverhalten von vier Triebfahrzeugführern und den energieoptimierten Fahrverlauf auf der Strecke Welkenraedt-Verniers (Belgien).

Fahrzeit und Energieverbrauch der durchgeführten fünf Fahrten (vier manuelle und eine optimierte):
| Fahrzeit (in Sekunden) | Energieverbrauch (in kWh) | |
|---|---|---|
| Fahrer 1 | 750 | 148,85 |
| Fahrer 2 | 713 | 195,49 |
| Fahrer 3 | 1041 | 173,57 |
| Fahrer 4 | 682 | 178,35 |
| Optimiertes Fahrprofil | 750 | 116 |
Die Ergebnisse zeigen, dass eine an die Streckenbelegung und Restfahrzeit angepasste Fahrweise eine geringere Maximalgeschwindigkeit mit geringeren Beschleunigungs- und Bremsraten aufweist. Dieses Fahrverhalten reduziert den Energiebedarf bei gleichzeitig pünktlicher Ankunft. Im Vergleich zum schnellsten Fahrer (Fahrer 4) sinkt der Energiebedarf um 35 Prozent. Fahrer 1 erreichte die identische Fahrzeit wie der optimierte Fahrverlauf, benötigte jedoch 22 Prozent mehr Energie3. Eine rechnergestützte Optimierung und Zugsteuerung kann Energie in signifikantem Umfang einsparen.
Durch eine permanente Optimierung des Verkehrsflusses und entsprechender Fahrbefehle können Trassenkonflikte und somit Stopps auf freier Strecke vermindert werden. Bei starker Belegung einer Strecke und kurzen Fahrzeugfolgezeiten können Bremsvorgänge eines Zuges mit Beschleunigungsvorgängen anderer Züge in unmittelbarer Umgebung synchronisiert werden, sodass rekuperierte Energie möglichst effizient verwendet werden kann. Durch entsprechende Streckenausrüstung können Züge im wandernden Raumabstand fahren (auch Fahren auf elektronische Sicht oder Moving Block).
“Die Kapazität einer Strecke kann maximiert und die technische Ausrüstung minimiert werden, wenn auf ortsfeste Blöcke und deren Gleisfreimeldeanlagen verzichtet wird. Die Züge ermitteln dann den Standort ihres Zugschlusses selber und senden ihn quasi-kontinuierlich an den folgenden Zug. Dieser berechnet unter Berücksichtigung seines Bremsweges den Punkt, ab dem die Geschwindigkeit herabgesetzt werden muss. Wird dabei der Bremsweg des vorher fahrenden Zuges mit berücksichtigt, so wird das Fahren im relativen Bremswegabstand genannt, sonst Fahren im absoluten Bremswegabstand. Ein Fahren im relativen Bremswegabstand riskiert Auffahrunfälle, wenn der vorausfahrende Zug stärker als vorausberechnet abgebremst wird, zum Beispiel durch eine Kollision. Diese Verletzung des Grundprinzips der Ausfallsicherheit macht ein Fahren im relativen Bremswegabstand aufgrund der Sicherheitsanforderungen bei Eisenbahnen praxisuntauglich. Eine europaweit einheitliche technische Spezifikation für das Fahren im absoluten Bremswegabstand und wandernden Raumabstand hat die UIC mit ERTMS vorgegeben (ETCS Level 3).
Zu beachten ist, dass Fahren im beweglichen Raumabstand nur funktioniert, wenn alle beteiligten Züge mit der entsprechenden Technik ausgestattet sind. So muss die Position des Zugschlusses signaltechnisch sicher ermittelt werden oder eine eventuelle Zugtrennung innerhalb weniger Sekunden erkannt werden. Gerade im Güterverkehr mit seinem international austauschbaren Wagenpark ist bisher keine Lösung zur Zugintegritätsprüfung vorhanden. Denkbar ist eine Einführung hingegen bei Strecken mit artreinem Verkehr, wie etwa spezielle Hochgeschwindigkeitsstrecken oder (automatische) Stadtschnellbahnen. Dort ist eine Integritätsprüfung aufgrund der überschaubaren Anzahl der Fahrzeuge leichter zu realisieren bzw. unnötig, wenn untrennbare Einheiten verkehren. Fahren im wandernden Raumabstand wird bereits bei ersten Stadtschnellbahn-Systemen eingesetzt.” (Wikipedia zum Thema “Fahren im wandernden Raumabstand”)
Neben steigender Energieeffizienz und Streckenkapazität können durch einen automatisierten Bahnbetrieb die Personalkosten weitgehend reduziert werden. Je nach System kann die Bereitstellung / Abstellung von Zügen und / oder die Beförderung von Fahrgästen effizienter gestaltet werden. Durch eine Optimierung in Echtzeit kann die gefahrene Geschwindigkeit an externe Einflüsse angepasst werden. Bei Verfrühungen kann beispielsweise die Höchstgeschwindigkeit automatisiert herabgesetzt und somit der Verschleiß an Fahrzeugen und der Strecke verringert werden.
Die Wirtschaftlichkeit des Systems Bahn steigt. Die Einsparungspotenziale sind jedoch abhängig vom Grad der Automatisierung.
Ein automatisierter Bahnbetrieb muss mindestens das Sicherheitslevel eines manuellen Betriebes erreichen, wenn nicht gar ein mehr an Sicherheit bieten. Durch eine Minimierung menschlicher Fehlerquellen bei gleichzeitig redundanter Auflegung der Steuerungssysteme kann die Sicherheit des Bahnverkehrs weiter gesteigert werden.
Die Vorteile in der Zusammenfassung
| Nutzen | halbautomatisierter Bahnbetrieb | fahrerloser Bahnbetrieb | unbemannter Bahnbetrieb |
|---|---|---|---|
| Höhere Sicherheit | ✔ | ✔ | ✔ |
| Bessere Vorhersage von Fahrzeiten | ✔ | ✔ | ✔ |
| Höherer Fahrkomfort durch gleichmäßigeres Anfahren und Bremsen | ✔ | ✔ | ✔ |
| Energieoptimiertes Fahren | ✔ | ✔ | ✔ |
| Geringerer Verschleiß | ✔ | ✔ | ✔ |
| Höhere Wirtschaftlichkeit durch automatisierte Abstellung / Bereitstellung und Fahrzeugwenden | ✔ | ✔ | |
| Sicherstellung eines gleichmäßigen Betriebs auf einer Linie | ✔ | ✔ | |
| Reduktion der Personalkosten und dadurch steigende Wirtschaftlichkeit | ✔ | ||
| Wegfall von Dienstzeitbeschränkungen | ✔ | ||
| Flexibilisierung des Bahnbetriebs | ✔ | ||
| Möglichkeit kürzere Züge häufiger verkehren zu lassen | ✔ | ||
| rasche Reaktion auf Nachfragesteigerungen möglich | ✔ | ||
| Keine Auswirkungen durch Streiks (Ausnahme: Werkstatt, FDL) | ✔ |
Hürden auf dem Weg zum automatisierten Bahnbetrieb
Der mit einer Automatisierung einhergehende Kontrollverlust und eine allgemeine Skepsis gegenüber Technik können bei Fahrgästen Widerstände gegen die Nutzung von einem von Computern gesteuerten Zug hervorrufen. Auf lange Sicht dürfte dieser Widerstand keine oder nur eine sehr geringe Rolle spielen, vor allem wenn ein Teil der Einsparungen an den Fahrgast zurückgegeben wird.
Geringe Akzeptanz für den automatisierten Bahnbetrieb dürfte auch aufseiten der Triebfahrzeugführer vorhanden sein. Da eine entsprechende Transformation jedoch mehrere Jahrzehnte dauert, kann die Umstellung in aller Regel ohne Arbeitsplatzverlust erfolgen (siehe London Tube). Je nach System und Grad der Automatisierung kann es auch Vorteile für das Fahrpersonal haben. Einfachere Abläufe, ein unterstütztes Fahren und eine Komplexitätsreduktion bedeuten weniger Stress und einen besseren Gesundheitszustand.
Die Kosten für eine Umstellung auf automatisierten Betrieb sind sehr hoch. Die entsprechende Technik muss sowohl fahrzeugseitig wie auch infrastrukturseitig verbaut werden. Eine Umrüstung von Fahrzeugen dürfte mit Blick auf die Anforderungen, Dauer und Kosten einer Zulassung von Schienenfahrzeugen in Deutschland nicht oder nur sehr schwer möglich sein. Dies bedeutet im Umkehrschluss, dass nur Neufahrzeuge für einen automatisierten Betrieb ausgelegt sein werden. Ein Mischbetrieb von automatisierten Neufahrzeugen mit manuell gesteuerten Zügen (Altfahrzeuge) kann jedoch nicht das volle Potenzial der Technik entfalten. Die Kapazität einer Strecke bestimmt sich letztlich aus der Performance des schwächsten bzw. langsamsten Nutzers. Es erscheint daher sinnvoll, Strecken, welche eine dichte Fahrzeugfolge aufweisen, artrein zu betreiben.
Die Umrüstung der Strecken ist ebenfalls sehr kapitalintensiv. Insbesondere der Schienengüterverkehr verkehrt nicht nur innerhalb von nationalen Grenzen und Bahnsystemen, sondern europaweit. Die Leit- und Sicherungstechnik, welche bei automatisiertem Betrieb von essenzieller Bedeutung ist, muss auf jedes Land einzeln abgestimmt und untereinander möglichst kompatibel sein. Auch im Jahr 2014 gibt es in Europa historisch bedingt viele unterschiedliche nationale Zugsicherungssysteme, welche untereinander nicht kompatibel sind. Mehrsystemlokomotiven haben daher bis zu zehn unterschiedliche Zugsicherungen eingebaut. Die bestehenden, nationalen Zugsicherungssysteme sollen in Europa durch den neuen Standard ETCS (European Train Control System) ersetzt werden. Mit ETCS können Züge und Strecken elektronisch überwacht und gesteuert werden. ETCS ist jedoch für den manuellen Betrieb spezifiziert worden. Dennoch könnte ETCS als automatische Zugsicherung (Automatic Train Protection (ATP)) bei einem automatisierten Zugbetrieb dienen.
Die Systemanforderungen, die Systemarchitektur und die Oberflächen der automatischen Zugsteuerung ATO müssten jedoch an die technischen, operativen und regulatorischen Gegebenheiten, welche durch ETCS gesetzt werden, angepasst werden. So erscheint es beispielsweise sinnvoll, die Datenübertragung im gleichen Dateiformat und über die gleiche Infrastruktur abzuwickeln.
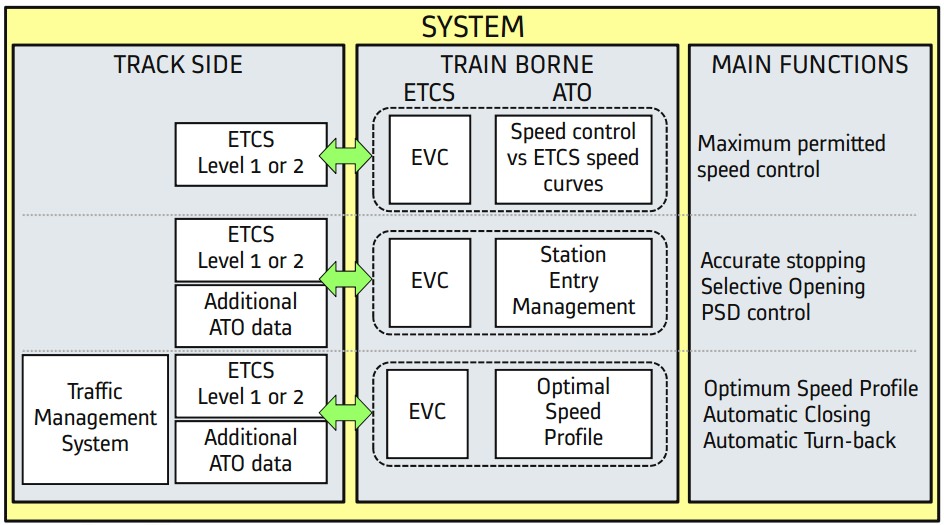
Bei einer Integration von ATO, dem Traffic Management System und ETCS wäre ein energieoptimiertes Fahrprofil mit automatischem Haltevorgang möglich. Ohne Balisen-gestützte ATO kann das System den Zug nur bis zur Einfahrt in den Bahnhof führen. Die Einfahrt und den Haltevorgang müsste der Fahrer manuell vornehmen, da ETCS nicht dazu ausgelegt ist, den Zug am Bahnsteig komfortabel und sicher zum Halten zu bringen.

Herausforderung: Ausrüstung von Bahnstrecken mit ETCS
In den verschiedenen Leveln von ETCS erfolgt die Kommunikation zwischen Zug und Stellwerk zum Teil über im Gleis verlegten Balisen oder über Funk. Das bahnspezifische Mobilfunksystem GSM-R dient für die Sprach- und Datenkommunikation zwischen den Fahrzeugen, mobilen Endgeräten und ortsfesten Einrichtungen. Die Umrüstung bestehender Strecken ist in Deutschland – obwohl sie sich derzeit auf einige wenige Korridore beschränkt – eine große Herausforderung.
In der Technischen Spezifikation für die Interoperabilität (TSI) zum Teilsystem. „Zugsteuerung, Zugsicherung und Signalgebung“ (TSI ZZS), einer technischen Spezifikation für die Interoperabilität im Schienenverkehrs der Europäischen Union, sind sechs ETCS-Güterverkehrskorridore definiert, von denen vier durch Deutschland führen (Korridor A: Rotterdam – Genua, Korridor B: Stockholm – Neapel, Korridor E: Dresden – Prag (-Budapest – Constanta), F: (Antwerpen -) Aachen – Warschau (- Terespol):

Die TSI ZZS regelt ferner, dass alle Neubaustrecken mit ETCS auszurüsten sind. Diese Verpflichtung gilt auch bei großen Umbaumaßnahmen auf Strecken des TEN-Netzes, welche die Kapazität bzw. Leistungsfähigkeit erhöhen. Zurzeit laufen in Deutschland die ETCS-Ausrüstung der Neubaustrecke VDE 8.2 Erfurt – Halle/Leipzig und der Neubaustrecke VDE 8.1 Ebensfeld – Erfurt sowie des Korridor A (Rotterdam – Genua).

In Deutschland hat die DB Netz AG zurzeit 2.465 km zweigleisige Strecken mit Linienzugbeeinflussung (LZB)4 in Betrieb. Diese Strecken sollen in den 2020er Jahren von LZB auf ETCS L2 aufgerüstet werden.
Das European Train Control System (ETCS) ist Kern von ERTMS (European Rail Traffic Management System). Dieses umfasst des Weiteren GSM-R, welches Trägernetz für ETCS Level 2 und 3 ist, und ETML, welches dem europaweiten Management von Fahrplantrassen dient. Auch das Verkehrsmanagement soll in Zukunft vereinheitlicht werden.
Die Probleme – insbesondere finanzieller Art – bei der Einführung von ETCS lassen es äußerst unrealistisch erscheinen, dass die streckenseitige Ausrüstung für einen automatisierten Zugbetrieb in naher Zukunft umgesetzt wird.
Hinzu kommen einige technische Fragestellungen wie die Sicherstellung einer sicheren seitenselektiven Türfreigabe durch den Computer oder bezüglich der sicheren Notöffnung von Türen.
Die Hürden in der Zusammenfassung
- Das Streckennetz ist größer und weitaus komplexer. Eisenbahnverkehre sind oftmals nicht an einzelne Strecken gebunden, Züge verkehren nicht nur auf einzelnen Abschnitten. Im Güterverkehr ist ein europaweiter Einsatz nicht unüblich.
- Eine Ausrüstung der Strecke und der Aufbau entsprechender Infrastruktur würde mehrere Jahrzehnte dauern und mindestens einen hohen zweistelligen Milliardenbetrag kosten. Bei derzeitiger Finanzlage erscheint eine schnelle Umsetzung unwahrscheinlich.
- Auf dem Schienennetz sind viele unterschiedliche Baureihen mit unterschiedlichen technischen Spezifikationen (z.B. Türpositionen) unterwegs. Die Komplexität ist somit sehr hoch.
- Eine Nachrüstung von Altfahrzeugen ist durch den Zwang zu einer Neuzulassung nahezu unmöglich. Ein automatisierter Betrieb erscheint nur mit Neufahrzeugen realistisch (Zulassungsverfahren möglicherweise ebenfalls schwierig).
- Auf dem Schienennetz sind eine Vielzahl unterschiedlicher Eisenbahnverkehrsunternehmen mit unterschiedlicher Finanzkraft unterwegs. Zum Heben entsprechender Effizienzpotenziale muss jedoch ein Großteil der Flotte umgerüstet und auf automatisierten Fahrbetrieb umgestellt werden. Züge – insbesondere im Nahverkehr – gehören zu Teilen nicht den Eisenbahnverkehrsunternehmen, sondern Leasingunternehmen.
- Viele Einflussgrößen von außen: Bahnsteige, Bahnübergänge, Rangierer, Bauarbeiten, illegales Überqueren von Gleisanlagen, usw.
Das Einzäunen des gesamten deutschen Streckennetzes ist unrealistisch und im Unterhalt unbezahlbar. - Vergleichsweise viele Baustellen bei stattfindendem Zugverkehr
Fazit
Der automatisierte Bahnbetrieb wird auf lange Sicht auch abseits von Metrosystemen eine Anwendung finden. Es ist jedoch fraglich, ob im Regional- und Fernverkehr ein unbemannter Betrieb erreicht werden kann oder ob ein automatisierter Betrieb nur eine unterstützende Funktion für den Triebfahrzeugführer einnimmt. Zwar sind entsprechende Anwendungen grundsätzlich technisch umsetzbar, jedoch stehen einer schnellen Umsetzung noch einige technische Hürden sowie Investitionen in Infrastruktur, Kommunikationstechnik, Leittechnik und Fahrzeuge entgegen.
Die Herausforderungen für eine Transformation sind groß, da eine schrittweise Umstellung komplex und schwierig umzusetzen ist. Ein automatisierter Bahnbetrieb kann jedoch die Kapazität stark ausgelasteter Strecken weiter erhöhen und dürfte vor allem für Korridorverkehre und S-Bahn-Verkehre interessant sein. Auch in Bereich Energieoptimierung kann eine teilweise Automatisierung substanzielle Einsparungen erzeugen.
Meiner Meinung nach dürfte ein automatisierter Bahnbetrieb mittelfristig auf kleinen Netzen und einigen Netzabschnitten wie Schnellfahrstrecken eingeführt werden. Die Hoffnung vieler, dass mit einer Automatisierung des Bahnverkehrs Streiks und deren Auswirkungen egalisiert werden können, dürfte sich jedoch nicht erfüllen.
Aktualisierung – 02.11.2015
Nicht mehr funktionierende Youtube-Videos ersetzt.
- Zum Beispiel: U-Bahn Nürnberg, U-Bahn München, U-Bahn Wien, Ankara Metro, Barcelona Metro, Dubai Metro, MRT / LRT in Singapur, usw. ↩
- Benoit Bienfait and Patrick Zoetardt, Alstom Transport Belgium; Bob Barnard, Signalling Solutions Ltd, UK: AUTOMATIC TRAIN OPERATION: THE MANDATORY IMPROVEMENT FOR ETCS APPLICATIONS, 2012, Seite 9 ↩
- ebd. ↩
- “Die LZB ist ein rechnergesteuertes Zugsicherungs- und Zugsteuerungssystem. Sie sichert die Zugfahrten durch eine lückenlose Überwachung der Geschwindigkeiten und steuert sie mit Hilfe der Führerraumanzeigen oder direkt mittels der Automatischen Fahr- und Bremssteuerung (AFB). Dem Triebfahrzeugführer ermöglicht sie das “Fahren auf elektronische Sicht” über mehrere Blockabschnitte, da ihm über die kontinuierliche Führerraumsignalisierung der jeweils zur Verfügung stehende freie Fahrweg und der Bremsweg angezeigt wird. Durch die LZB wird sichergestellt, dass die Züge die örtlich zulässige Geschwindigkeit nicht überschreiten, den freigegebenen Fahrweg nicht verlassen und die streckenseitigen Signalisierungen umsetzen. (…) Für die LZB wird im Gleis eine Linienleiterschleife als Antenne verlegt. Eine Ader der Schleife liegt in Gleismitte, die andere seitlich in der Laschenkammer einer Schiene. Die beiden Adern werden alle 100 m gekreuzt. Mithilfe dieser Kreuzungsstellen als Referenzpunkte kann sich der Zug selbst grob orten. Die Feinortung innerhalb der 100-m-Schleifen geschieht durch Messung der Radumdrehungen des Triebfahrzeugs (Tfz). Die genaue Selbstortung des Fahrzeuge ist erforderlich, um den Zug durch die LZB zielgenau zum Halten zu bringen.” – Quelle: http://www.marco-wegener.de/technik/index.htm – aufgerufen am 06.11.2014 ↩